武汉芯源CW32F030开发板评测 06 RTOS移植 RT-Thread Nano
武汉芯源CW32F030开发板评测 06 RTOS移植 RT-Thread Nano
硬件平台
- CW32_48F大学计划板
- CW32_IOT_EVA物联网开发评估套件
RT-Thread Nano
RT-Thread Nano 是一个极简版的硬实时内核,它是由 C 语言开发,采用面向对象的编程思维,具有良好的代码风格,是一款可裁剪的、抢占式实时多任务的 RTOS。其内存资源占用极小,功能包括任务处理、软件定时器、信号量、邮箱和实时调度等相对完整的实时操作系统特性。适用于家电、消费电子、医疗设备、工控等领域大量使用的 32 位 ARM 入门级 MCU 的场合。
下图是 RT-Thread Nano 的软件框图,包含支持的 CPU 架构与内核源码,还有可拆卸的 FinSH 组件:

支持架构:ARM:Cortex M0/ M3/ M4/ M7 等、RISC-V 及其他。
功能:线程管理、线程间同步与通信、时钟管理、中断管理、内存管理。
RT-Thread Nano的特点
下载简单
RT-Thread Nano 以软件包的方式集成在 Keil MDK 与 CubeMX 中,可 以直接在软件中下载 Nano 软件包获取源码,获取方式详见 基于 Keil MDK 移植 RT-Thread Nano 与 基于 CubeMX 移植 RT-Thread Nano 。同时也提供 下载 Nano 源码压缩包 的途径,方便在其他开发环境移植 RT-Thread Nano,如 基于 IAR 移植 RT-Thread Nano。
代码简单 与RT-Thread 完整版不同的是,Nano 不含 Scons 构建系统,不需要 Kconfig 以及 Env 配置工具,也去除了完整版特有的 device 框架和组件,仅是一个纯净的内核。
移植简单 由于 Nano 的极简特性,使 Nano 的移植过程变得极为简单。添加 Nano 源码到工程,就已完成 90% 的移植工作。
使用简单 RT-Thread Nano 在使用上也非常简单,带给开发者友好的开发体验。
易裁剪:Nano 的配置文件为 rtconfig.h,该文件中列出了内核中的所有宏定义,有些默认没有打开,如需使用,打开即可。具体的配置可见 Nano 版块的 RT-Thread Nano 配置 教程。
易添加 FinSH 组件:FinSH 组件 可以很方便的在 Nano 上进行移植,而不再依赖 device 框架,只需要对接两个必要的函数即可完成 FinSH 移植。
资源占用小:对 RAM 与 ROM 的开销非常小,在支持 semaphore 和 mailbox 特性,并运行两个线程 (main 线程 + idle 线程) 情况下,ROM 和 RAM 依然保持着极小的尺寸,RAM 占用约 1K 左右,ROM 占用 4K 左右。 注:如果需要丰富的组件、驱动以及软件包等功能,则建议使用 RT-Thread 完整版。
移植过程
打开一个支持串口printf打印的工程模板
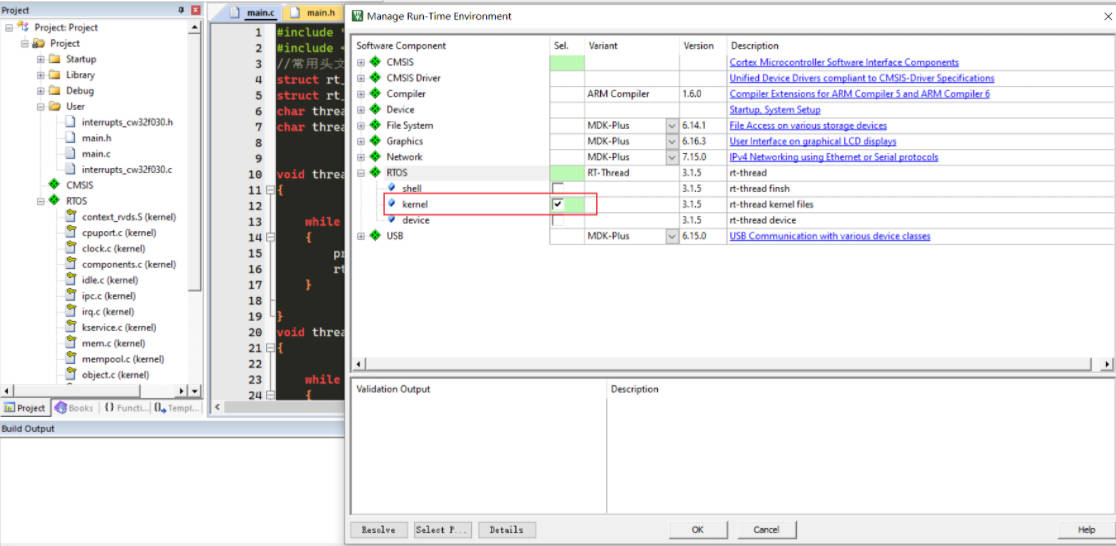
打开manage Run-Time Environment工具,选择RT-Thread,我们这里只选择kenel。
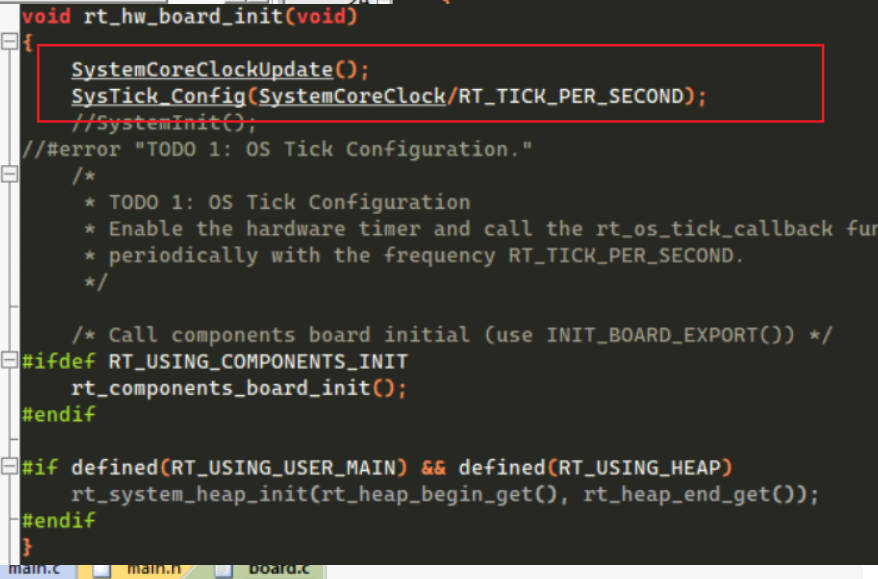
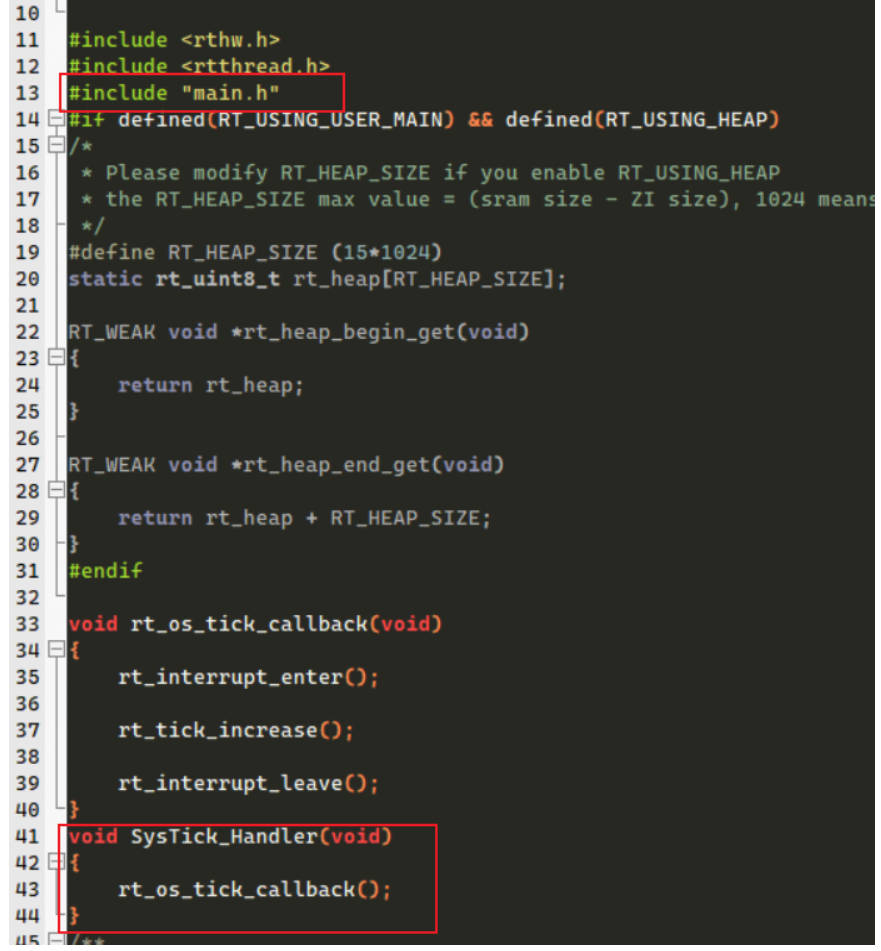
打开RTOS目录下的board.c文件,添加main.h头文件的引用、添加系统心路中断函数、添加systick初始化。
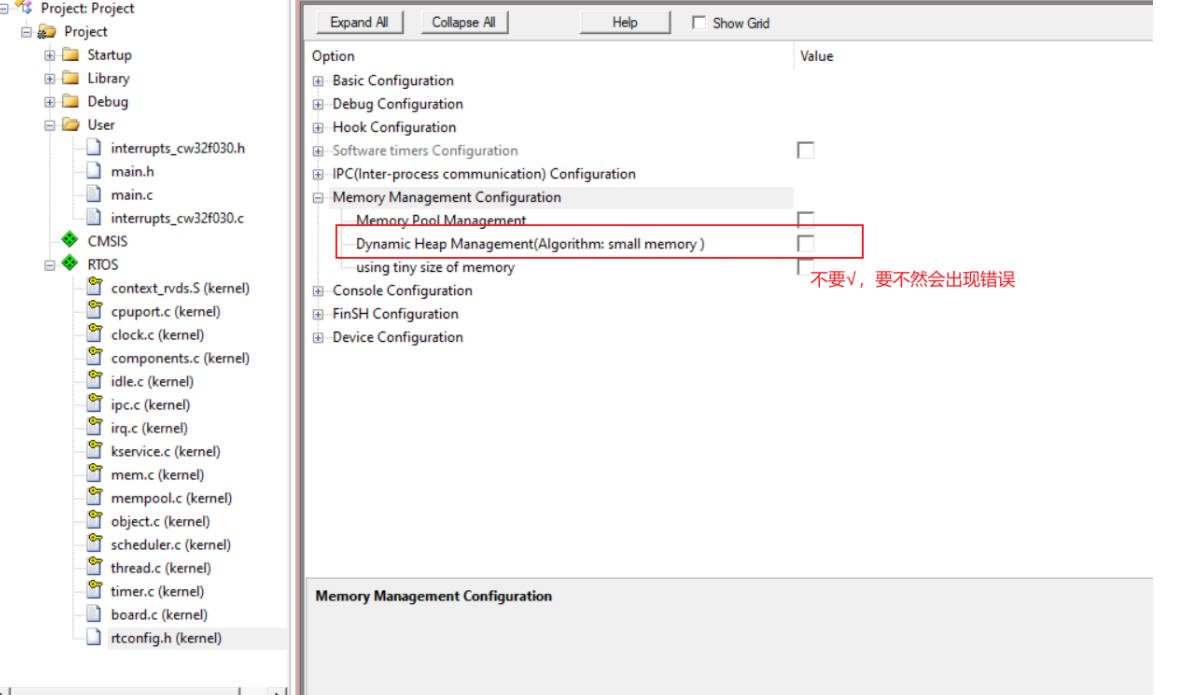
打开rtthconfig.h中内存管理的选项
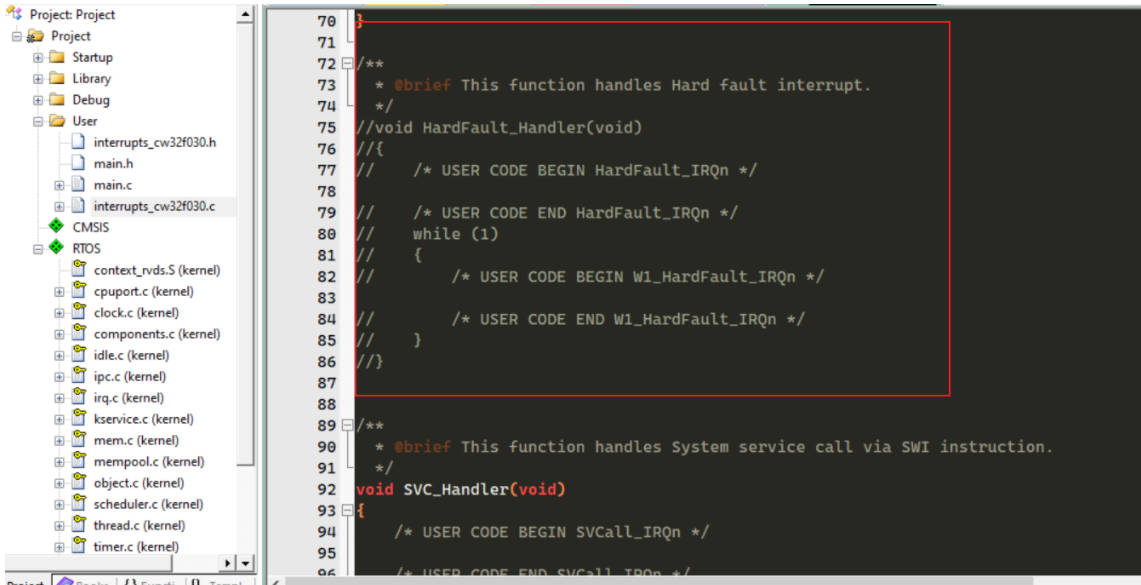
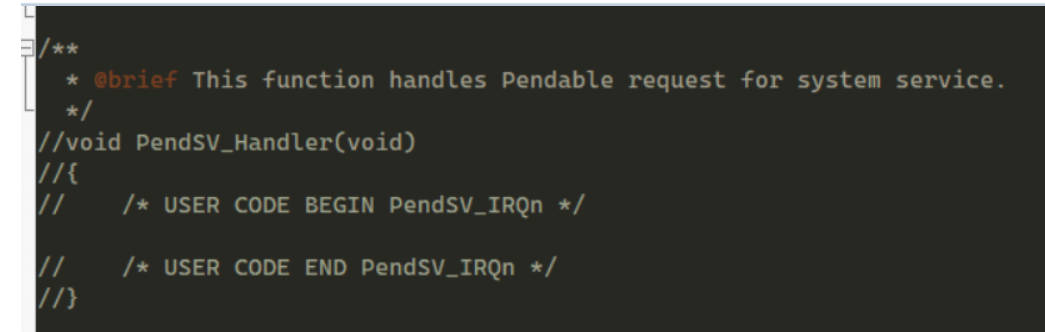
注释掉interrupts_cw32放0.c中HardFault_Handler、PendSV_Handler两个函数,避免出现得新定义的错误
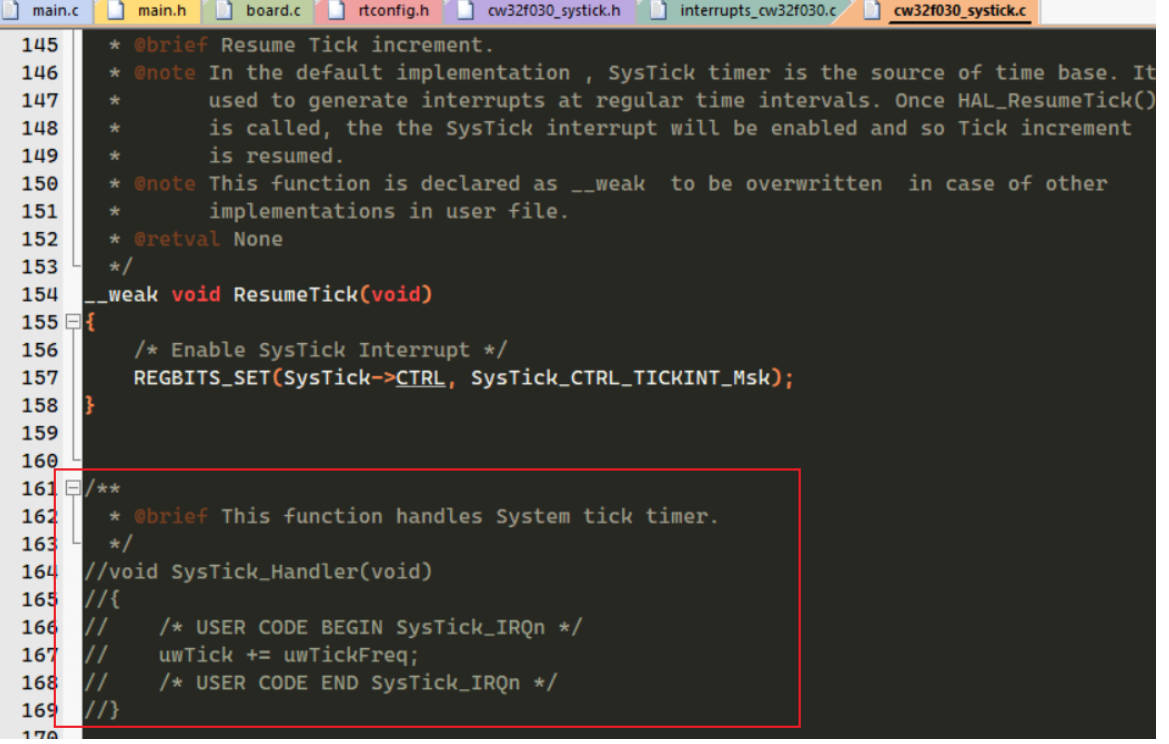
注释掉cw32f030_systick.c中的SysTick_Handler函数,避免出现得新定义的错误
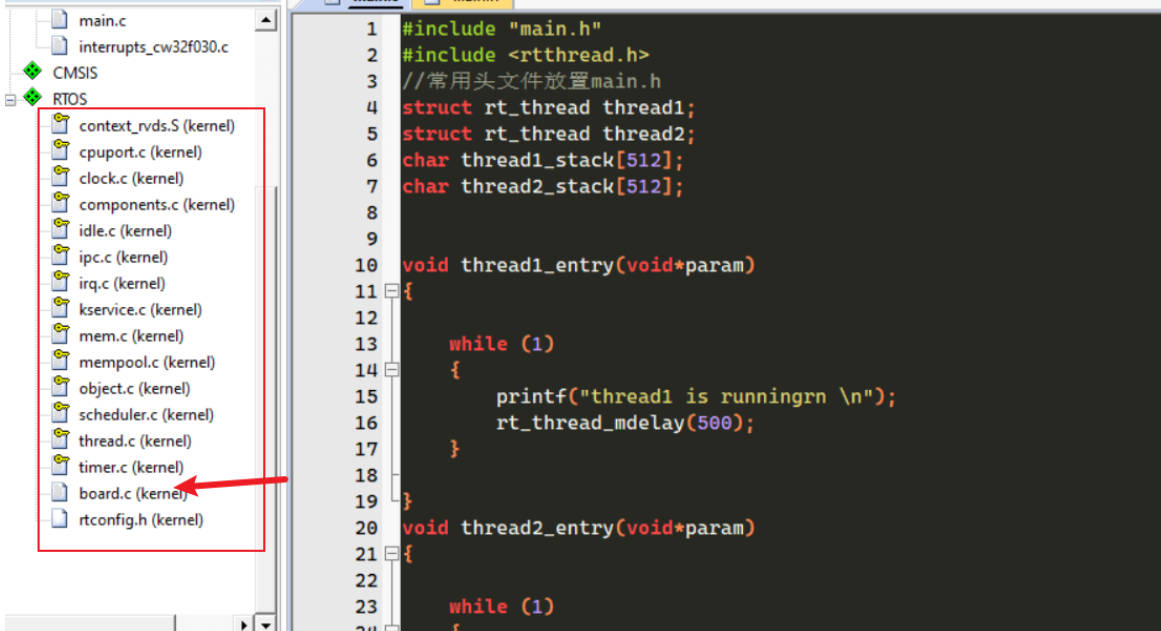
在main.c中添加rtthreah.h的头文件引用,再添回两个任务函数,并在主程序中启动
#include "main.h"
#include <rtthread.h>
//常用头文件放置main.h
struct rt_thread thread1;
struct rt_thread thread2;
char thread1_stack[512];
char thread2_stack[512];
void thread1_entry(void*param)
{
while (1)
{
printf("thread1 is runningrn \n");
rt_thread_mdelay(500);
}
}
void thread2_entry(void*param)
{
while (1)
{
printf("thread2is runningrn \n");
rt_thread_mdelay(3000);
}
}
void thread1_init(void)
{
rt_err_t fd=rt_thread_init(&thread1,"thread1",
&thread1_entry,0,
&thread1_stack[0],
sizeof(thread1_stack),10,10);
if(fd < 0)
{
printf("thread1 init is fail rn \n");
}
else
{
printf("thread1init is success rn \n");
}
rt_thread_startup(&thread1);
}
void thread2_init(void)
{
rt_err_t fd=rt_thread_init(&thread2,"thread2",
&thread2_entry,0,
&thread2_stack[0],
sizeof(thread2_stack),10,10);
if(fd < 0)
{
printf("thread2 init is fail rn \n");
}
else
{
printf("thread2init is success rn \n");
}
rt_thread_startup(&thread2);
}
int32_t main(void)
{
RCC_Configuration(); //时钟配置64M,时钟配置以移动到systejm_cw32f030.h
UART_Configuration();//printf函数初始化,函数主体在Debug.c,使用串口1,和大学板的LED3冲突。
thread1_init();
thread2_init();
printf("cw32f030-rtthread init \n");
while(1)
{
}
}
测试效果
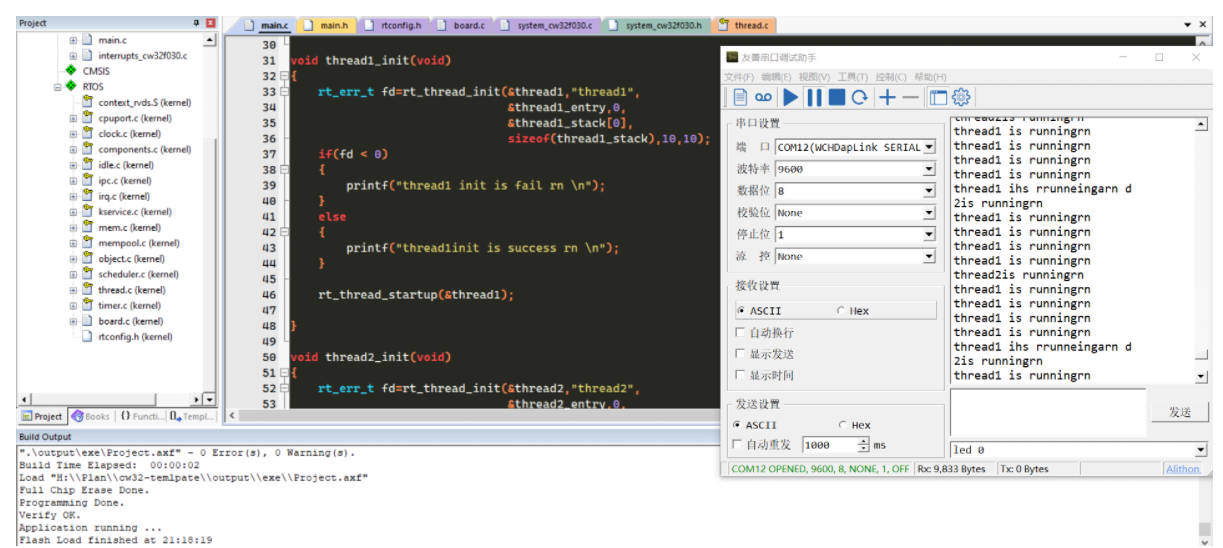 移植可能还有问题,只是初步移植,目前能串口打印,但是我感觉串口打印有乱七八糟码,而且打印速度非常快,可能这个部分有问题,后面看看能否移植FinSH组件
移植可能还有问题,只是初步移植,目前能串口打印,但是我感觉串口打印有乱七八糟码,而且打印速度非常快,可能这个部分有问题,后面看看能否移植FinSH组件